Dorastałem w latach 80 i 90. Wtedy posiadanie auta na zdalne sterowanie było marzeniem nie dostępnych dla wielu dzieci, a ten kto go miał, był królem podwórka. Marzyłem o takim i po wielu latach marzenie spełniłem. Oczywiście od dłuższego czasu można je swobodnie kupić u nas w kraju, ale nie byłbym sobą gdybym po prostu poszedł do sklepu i kupił. Największą frajdą jest wykorzystać swoje umiejętności i zbudować go samemu. Dlatego dopiero teraz dorobiłem się swojego modelu.
Zaletą budowania od podstaw jest możliwość wpływania na kształt ostateczny. U mnie głównym założeniem była uniwersalność. Udało mi się zbudować urządzenie, które mogę podłączyć do dowolnego pojazdu (czołgu, samochodu, samolotu, łodzi podwodnej) i nim sterować. Wiele różnych modeli może być zarządzanych tym jednym nadajnikiem.
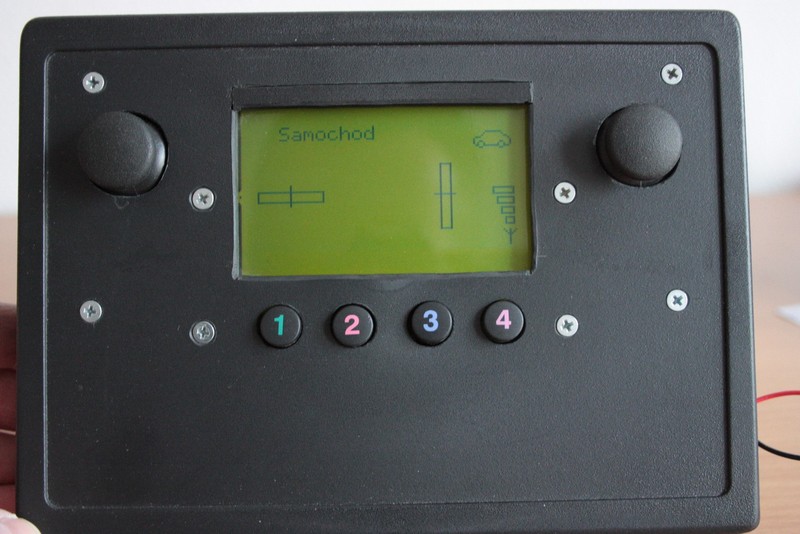
Nadajnik
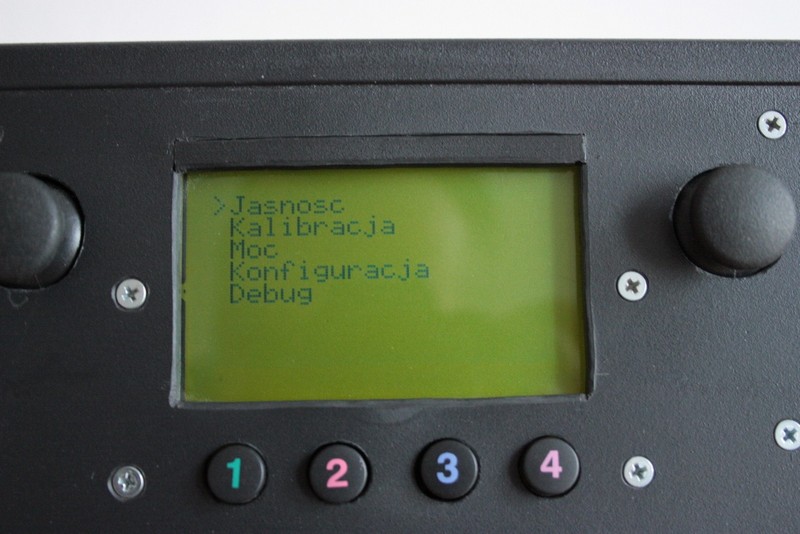
To dwa manipulatory z prostego kontrolera gier oraz wyświetlacz graficzny LCD PG12864LRU-ORA-H. Guziki pozyskane z urządzenia dawcy wykorzystałem do poruszania się po menu urządzenia. Użyty wyświetlacz posiada wbudowane podświetlenie. Cechy urządzenia:
- kontrola jasności w pięciostopniowej skali
- pamięć nastaw w małej pamięć eeprom na I2C. Żeby uniknąć zapisywania stale w ten sam obszar pamięci, zastosowałem metodę przesuwania się po pamięci z tablicą alokacji na początku.
- kalibracja czułości gałek manipulatora
- regulacja mocy nadajnika w czterostopniowej skali
- zmiana trybów sterowania: czołg (oba manipulatory przód i tył), samochód (jeden manipulator lewo-prawo, drugi przód-tył)
W przyszłości zamierzam dodać:
- wybór kanału częstotliwości do sterowania. Umożliwi to wybór odbiornika i sterowanie kilkoma modelami z jednego nadajnika,
- ikona na ekranie zasilania bateryjnego lub z zasilacza,
- (o ile możliwe) monitorowanie zasilania w odbiorniku.
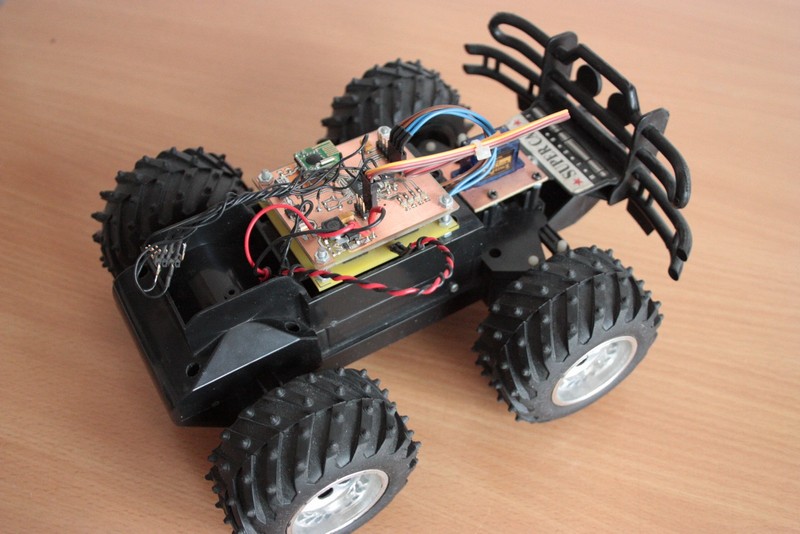
Odbiornik
W pierwszej wersji użyłem procesora PIC18f452 ale po wielu dziwnych problemach postanowiłem przerzucić się na stary i wypróbowany AVR (ATmega32 - taki był pod ręką). Tym razem poszło bez problemu. W urządzeniu tym, do zasilania 5V wykorzystałem prosty układ przetwornicy DC/DC opartej na MCP16301. Do zasilania modułu radiowego (RFM70-S) wykorzystałem stabilizator liniowy. Cztery LEDy sygnalizują wybrane stany urządzenia. Pozostałe rzeczy to wyprowadzenia na 4 mostki H oraz dwa serwomechanizmy (PWM). W zależności od realizowanej funkcji odbiornik powinien odbierać dane i przekazywać je do bloku serwomechanizmu lub do mostka H.
Poniżej kilka fotografii urządzenia: